

Sur le net, on trouve presque autant de méthodes pour tuner les PID que pour fabriquer la pierre philosophale. Plusieurs méthodes existent, basées sur différents outils (comme la Blackbox), certaines sont complètes et d’autres abordent seulement une « partie » de la chose.
En voyant toutes ces méthodes, le petit druide, euh pilote que je suis s’est dit qu’il allait lire les infos sur comment faire pour le tuning PID, quels outils utiliser, etc… tout ceci dans le but de faire une méthode qui serait valable pour moi.
Je me suis notamment inspiré des informations données sur le site de Oscarliang, le blog de RC-Tidom et aussi sur AirSanglier (sanglier… quand je vous parlais de druide avant, on n’est pas loin finalement XD) et je me suis fait une marche à suivre pour tuner mes PID. Ensuite, il a bien fallu la mettre en pratique pour voir si c’était valable ou pas. Et il semblerait que ça le soit
Donc, ci-dessous, vous trouverez ce que j’utilise moi. C’est pas ZE méthode infaillible mais pour moi, ça a fonctionné donc je partage. Il se peut qu’il y ait des choses améliorables ou inutiles ou aberrantes mais je le répète, ça fonctionne et moi ça me suffit
Ce guide ne traite que les réglages du Pitch et du Roll. Pour le Yaw, personnellement, je continue à utiliser les valeurs par défaut de BetaFlight et ça me convient.
Contexte
- Le tuning de PID a été fait sous BetaFlight 3.0.0.
- Tout a été fait en Acro
- Les hélices utilisées étaient des tripales.
Dans un premier temps, il faut que vous ayez un multi déjà capable de voler. Ce guide n’aborde pas la configuration du multi au niveau de la calibration des moteurs ou autre, il faudra le faire vous-même auparavant avant.
> Modes de vol
Vous pouvez configurer des modes de vol si vous le désirez mais il faut impérativement avoir l’Acro de disponible.
Il faut donc aussi savoir voler en Acro à vue de même que faire des flip/roll à vue.
> PID
Ensuite, avant de commencer à tuner les PID, j’ai utilisé les valeurs par défaut de BetaFlight et j’ai déjà commencé par initialiser les paramètres entourés en rouge afin d’avoir :
- Une réactivité qui me correspondait.
- Vitesses de rotation Pitch/Roll qui étaient en adéquation avec ma manière de voler.
- Une réponse des gaz qui était douce
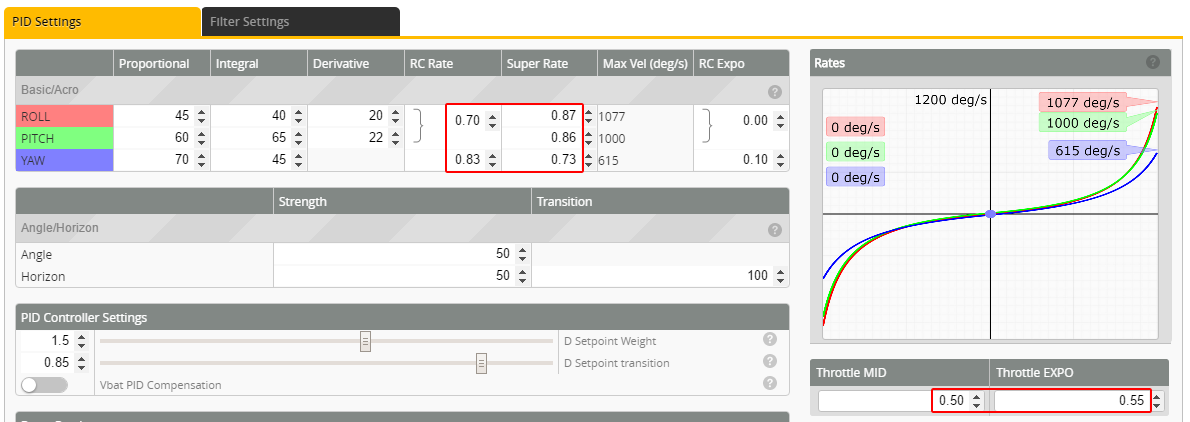
> TPA
En plus de ceci, j’ai mis le TPA à 0 pour qu’il n’influence pas le tuning par la suite.
Attention parce que suivant le multi que vous avez, si vous n’avez pas de TPA et que vous mettez les gaz à coin, il peut partir dans tous les sens (c’est le cas pour le mien donc j’ai dû faire gaffe).
Préparation
Pour faire les réglages de PID, il faut tester des valeurs différentes pour chaque paramètre (P, I et D) et voir jusqu’où on peut aller. Ça, vous le saviez, je sais… XD
Afin de faire ceci facilement, on va utiliser la partie Adjustments de BetaFlight Configurator afin d’assigner un switch de la télécommande pour pouvoir augmenter la valeur désirée. Personnellement, j’ai utilisé un switch qui revient à sa valeur « par défaut » dès que je ne le touche plus.
> Télécommande
Dans un premier temps, il faut choisir un switch à utiliser sur la télécommande, le configurer et voir à quelle channel AUX il correspond sur BetaFlight Configurator.
Faites en sorte que lors que le switch est en position « par défaut », la valeur envoyée au multi soit de 1500 environ. Vous pouvez jouer sur l’offset dans la configuration de la télécommande.
Assurez-vous bien sûr que lorsque vous êtes en position haute du switch, la valeur passe à 2000.
> BetaFlight Configurator - Adjustment
Afin de pouvoir utiliser le menu Adjustments sur la gauche, il faut passer en Expert mode. C’est une petite « case à cocher » tout près du bouton de connexion qui permet de faire la transition.
- Dans le menu Adjustments, on va configurer uniquement la première ligne.
- when channel
Sélectionnez la channel AUX qui est liée à votre nouveau switch sur la télécommande. - is in range
Sélectionnez une plage entre 1800 et 2000 - then apply
On va commencer par régler le P pour le Pitch donc sélectionnez Pitch P adjustment - using slot
Pas besoin de toucher ce paramètre - via channel
Là, il faut re-sélectionner la même channel que celle qui a été mise au point 1.
Note: Il y a des explications sur comment configurer ceci sur le blog de RC-Tidom mais lui il utilise 2 switch différents, ce qui peut être dérangeant si vous êtes déjà presque au max du nombre de channels utilisés…

Une fois que vous avez mis toutes les bonnes valeurs, n’oubliez pas de cliquer sur Save en bas, ça aide généralement.
> PID
Eh oui, y’a une « préparation » pour les PID !
Vous allez retourner dans BetaFlight Configurator, dans l’onglet PID Tuning et vous allez diviser par 2 toutes les valeurs P et I pour Pitch, Roll et Yaw. Il va sans dire que si ça ne tombe pas sur une valeur entière après la division, vous arrondissez vers le bas…
Pour le D, on va même diviser par 6 pour démarrer au plus bas !
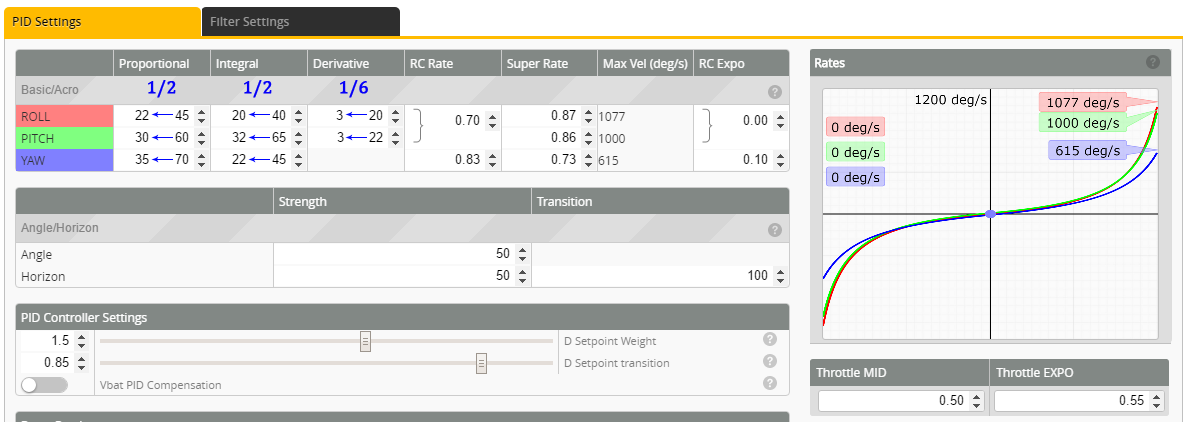
Afin de vous faciliter les choses pour la suite, notez les valeurs modifiées dans un fichier à côté ou faites une capture d’écran de celles-ci.
Go tuning !
C’est parti, on va pouvoir y aller.
Pour chaque valeur à régler, on va procéder d’une certaine manière, toujours en Acro !!
Si vous avez un buzzer sur votre multi, vous verrez qu’à chaque incrément de la valeur traitée via le switch attribué, vous entendrez un petit « bip ». ça permettra d’entendre où vous en êtes.
Grossièrement, on va procéder comme suit (plus de détails seront donnés plus bas) :
- Connecter la batterie (télécommande allumée avant, bien évidemment).
- Armer
- Décoller
- Augmenter la valeur courante tout en faisant évoluer le multi d’une manière à contrôler que la valeur soit correcte ou pas.
- Se poser
- Désarmer
- NE SURTOUT PAS DEBRANCHER LA BATTERIE car ça aurait pour effet de reset la valeur que vous avez actuellement dans la FC et que vous avez augmentée via le switch
- Brancher au PC
- Récupérer la valeur (dans un fichier à côté ou via une capture d’écran)
- Remettre la valeur par défaut
- Sauvegarder
- Configurer la nouvelle valeur à paramétrer
- Repartir au point 2.
Pour trouver la bonne valeur pour P, on va augmenter celle-ci progressivement jusqu’à ce que le multi commence à osciller dans l’axe sur lequel on le règle. La valeur de P devra être en effet la plus élevée possible.
On pourrait simplement voler en stationnaire, augmenter la valeur jusque ça oscille et dire que c’est bon… mais non. C’est comme ça que je faisais au début mais ce n’est pas assez parlant, ça permet de trop augmenter la valeur et après, le comportement n’est pas top.
Ce que j’ai donc fait, c’est que je prenais un peu d’altitude (3-5m), que je coupais les gaz et que je les remettais pour pouvoir stopper la chute avant le sol. Et c’est le moment où les gaz sont remis qu’il faut bien surveiller pour voir oscillation il y a.
Une oscillation peut être visuelle mais le plus généralement c’est à l’oreille qu’on la détectera le plus tôt. Donc évitez peut-être de faire ce tuning dans un endroit trop bruyant ou avec un bon casque sur les oreilles.
>> Pitch
On va commencer par configurer le Pitch. Utilisez les informations données dans la section « BetaFlight Configurator - Adjustment » pour faire ceci. Sélectionnez donc Pitch P Adjustment dans la liste.
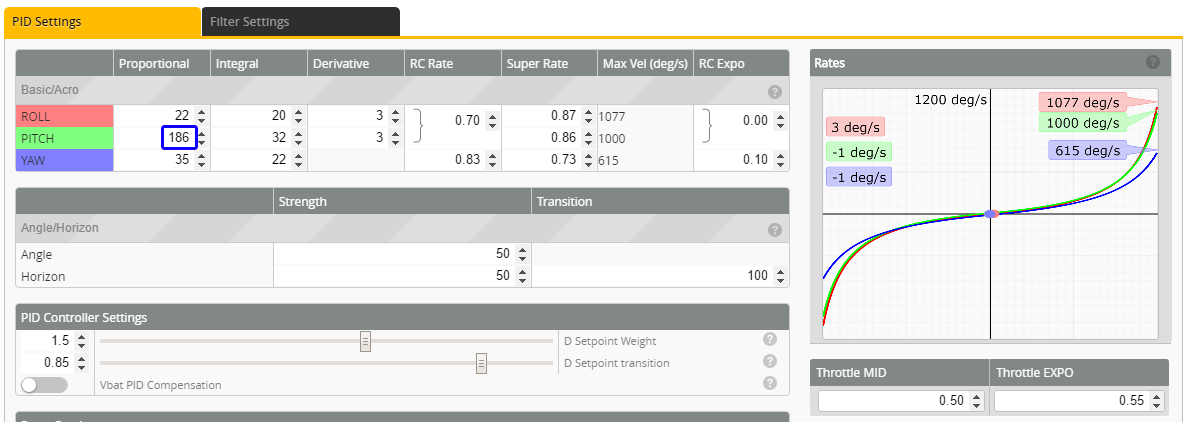
Faites la petite manip expliquée ci-dessus jusqu’à ce qu’une oscillation se présente. Ensuite, posez, désarmez, branchez au PC, lisez et notez la valeur, remettez la par défaut et passez au paragraphe ci-dessous.
La valeur que j’avais moi était la suivante, 186 :
>> Roll
Maintenant qu’on a trouvé la valeur d’oscillation pour le Pitch, on va faire de même pour le Roll.
Allez dans la partie Adjustments et dans la liste déroulante, sélectionnez « Roll P Adjustement ».
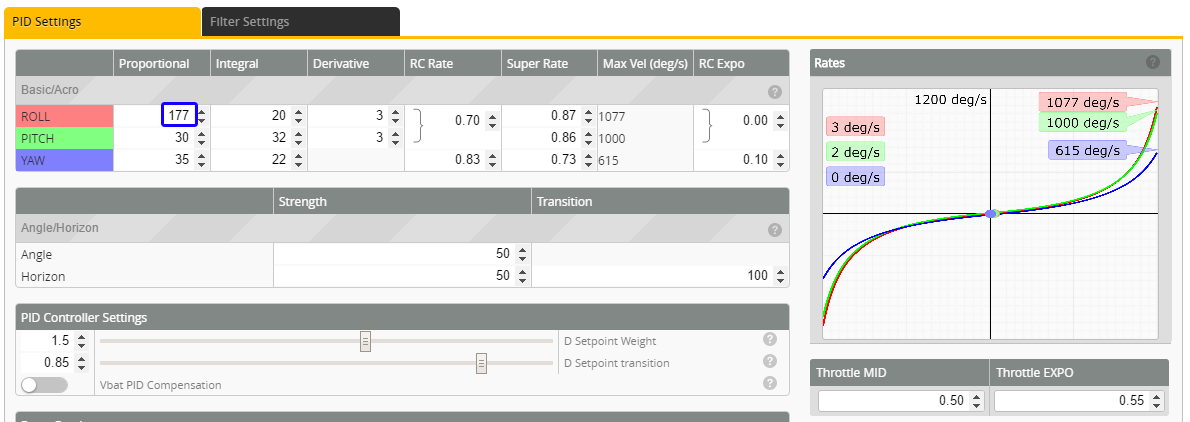
Faites la petite manip expliquée ci-dessus jusqu’à ce qu’une oscillation se présente. Ensuite, posez, désarmez et branchez au PC.
La valeur que j’avais moi était la suivante (177) :
>> Résultat
Voilà, là, on a les valeurs d’oscillation P pour le Pitch et le Roll. Avant de passer à la configuration des valeurs suivantes, on va initialiser celles-ci correctement dans BetaFlight afin qu’elles puissent servir de « base » pour l’étalonnage des autres valeurs.
Vu que vous avez déjà la valeur « Roll P » affichée, multipliez celle-ci par 0.7, arrondissez vers le bas et mettez le résultat dans la case.
Reprenez ensuite la valeur « Pitch P » que vous avez sauvegardée auparavant, multipliez là aussi par 0.7, arrondissez vers le bas et mettez le résultat dans la case.
A ce point, j’ai aussi repris la valeur de « Yaw P » par défaut de BetaFlight et je l’ai remise dans la case.
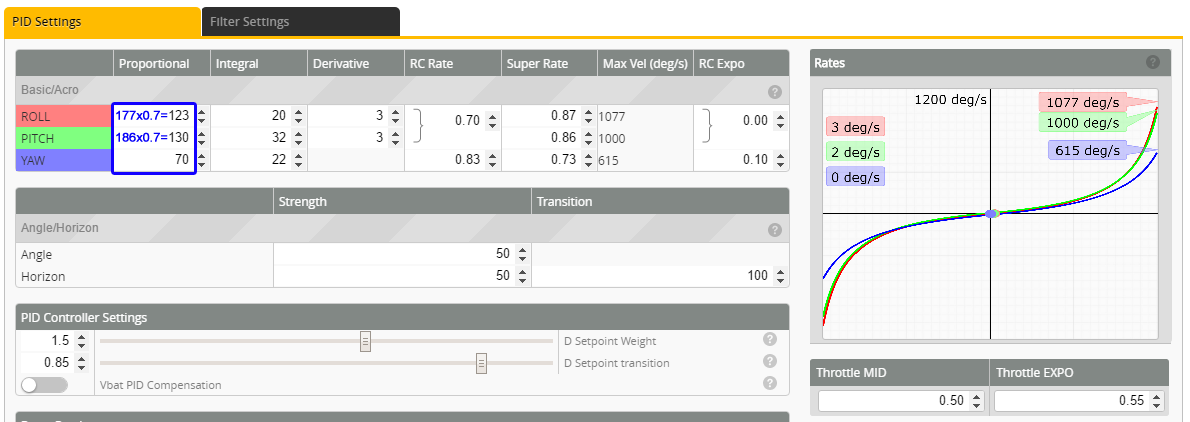
Cliquez sur Save et on passe à la suite.
> D
On va maintenant attaquer le D. Pourquoi je ne passe pas au « I » avant ?... ben je me suis dit que comme le « I » c’était plus la correction dans le temps, j’allais d’abord faire le D.
Pour la valeur D, on va l’augmenter progressivement comme pour P mais à l’inverse que là, on va tenter de la garder la plus bas possible ! C’est aussi pour cette raison qu’elle a été divisée par 6 et pas par 2 précédemment.
Au niveau de la manière de faire pour identifier si la valeur est correcte, ben vous allez faire des « flip » et des « roll » et voir comment le multi se comporte au moment de revenir à plat. S’il y a une oscillation lorsque celui-ci revient à plat, c’est que la valeur est trop basse et donc il faut l’augmenter. Et dès qu’il n’y a plus d’oscillation à la fin de la manœuvre, on arrête.
Comme expliqué avant, tout doit se faire en Acro donc ça sera à vous de remettre le multi de niveau après une manœuvre. Vous devez maintenant comprendre pourquoi j’ai configuré les vitesses de rotation plus haut afin d’être à l’aise. Ça permettra d’une part d’être plus rapide dans les manœuvres et donc de ne pas prendre trop d’altitude pour les faire et d’une autre part, ça sera plus « brusque » à l’arrêt de la rotation (avec mes valeurs en tout cas) et donc c’est là que la valeur D sera la plus « utilisée » et que l’effet sera le plus flagrant.
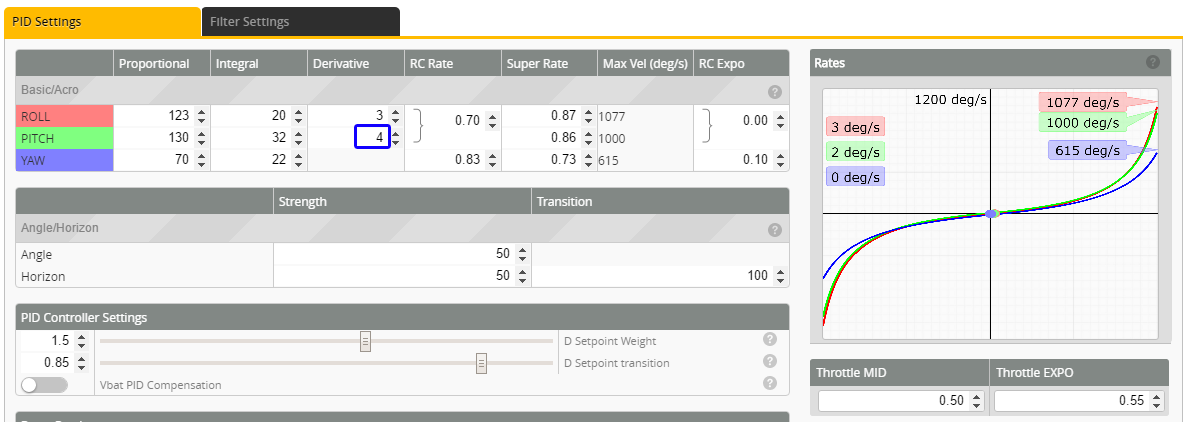
>> Pitch
Pour régler le « Pitch D », retournez dans l’onglet Adjustments et sélectionnez Pitch D Adjustment dans la liste.
C’est ensuite parti pour faire des flips en avant ou en arrière, c’est égal, il faut juste que vous soyez le plus à l’aise possible.
Dès qu’il n’y a plus d’oscillation, posez, désarmez, branchez au PC, lisez et notez la valeur, remettez la par défaut et passez au paragraphe ci-dessous.
Moi j’avais la valeur suivante, elle est très peu montée, elle est passée de 3 à 4 :
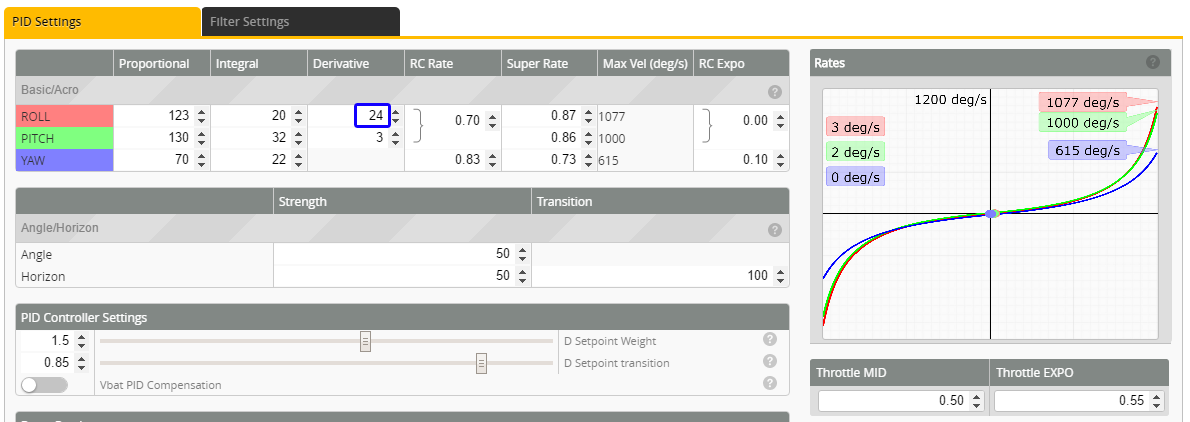
>> Roll
Et hop, on passe au Roll pour le D. Retournez dans l’onglet Adjustments et sélectionnez Roll D Adjustment dans la liste.
Faites des roll et augmentez la valeur D. Dès qu’il n’y a plus d’oscillation, posez, désarmez et branchez au PC.
La valeur que j’avais moi était la suivante, elle est cette fois-ci montée un peu plus haut que pour le Pitch :
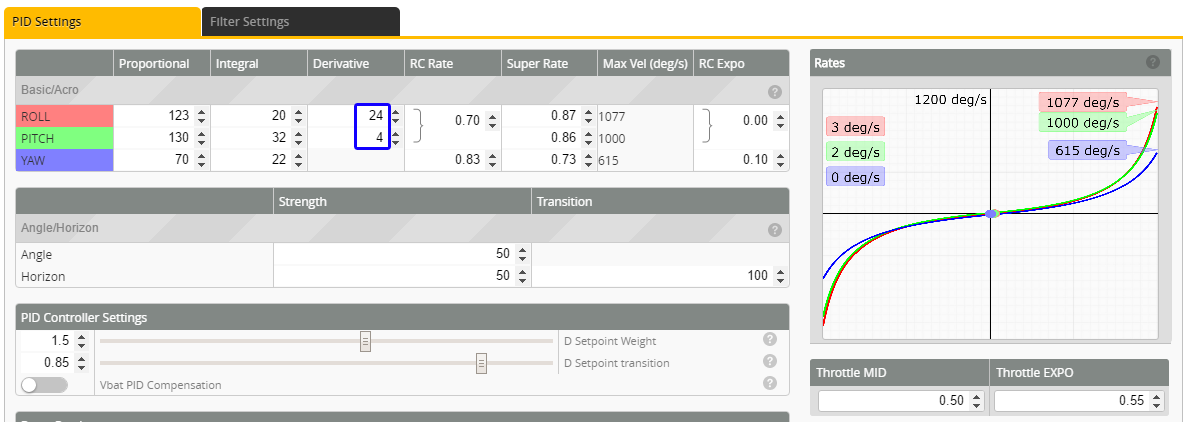
>> Résultat
Tout comme pour la configuration du P, on a maintenant nos 2 valeurs de D, pour Pitch et Roll. Cette fois-ci, on ne va pas multiplier par un facteur quelconque, on va garder les mêmes valeurs.
Mettez-les donc tel quel dans les 2 cases associées. Cliquez sur Save pour enregistrer.
> I
Bon ben il reste que le « I » à faire maintenant. Celui-ci permet de corriger l’erreur dans le temps. Le meilleur moyen pour arriver à trouver la bonne valeur, c’est d’induire une erreur dans le temps. Et pour faire ça, on va simplement ajouter du poids sous un des bras. Pour ma part, j’ai pris une batterie 3S 1300mAh que j’ai sanglée sous le bras avant droit.
L’idée, c’est de décoller en mode Angle (stabilisé), pour que le multi reste bien droit. Ensuite, on passe en mode Acro et on regarde comment il réagit, comment il commence à dériver à cause du poids ajouté sous le bras. Et on augmente la valeur « I » jusqu’à ce qu’il n’y ait plus de dérive dans l’axe (Pitch ou Roll) que l’on est en train de paramétrer.
>> Pitch
Retournez dans l’onglet Adjustments et sélectionnez Pitch I Adjustment dans la liste.
Décollez en mode Angle et une fois que vous serez à une hauteur que vous jugerez suffisante, passez en mode Acro. Au début, le multi va sembler stable et garder son niveau puis il va commencer à doucement dériver. C’est là qu’on peut comprendre que l’erreur se manifeste dans le temps.
Ramenez-le au point de départ avant qu’il parte trop loin et augmentez un peu la valeur de « I ». Remettez le multi de niveau et observez. Répéter la manipulation jusqu’à ce que la dérive dans l’axe Pitch soit nulle.
Quand vous serez satisfait du résultat, posez, désarmez et branchez au PC. Regardez jusqu’où la valeur est montée (par curiosité) et cliquez sur Save pour l’enregistrer. Il sera en effet plus aisé de régler la valeur « I » pour le Roll avec une valeur « I » déjà bonne pour le Pitch. Le multi devrait de ce fait dériver uniquement dans l’axe Roll.
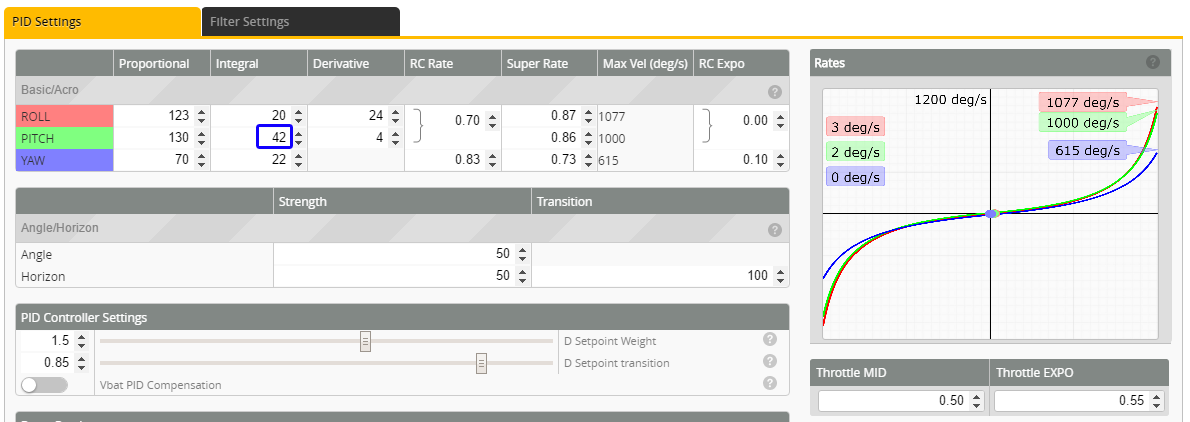
Dans mon cas, j’arrivais à la valeur suivante :
>> Roll
Retournez dans l’onglet Adjustments et sélectionnez Roll I Adjustment dans la liste.
Maintenant, on recommence la même manipulation que pour le Pitch, décollage en Angle, passage en Acro, etc…
Quand vous serez satisfait du résultat et que vous ne constaterez plus aucune dérive, posez, désarmez et branchez au PC.
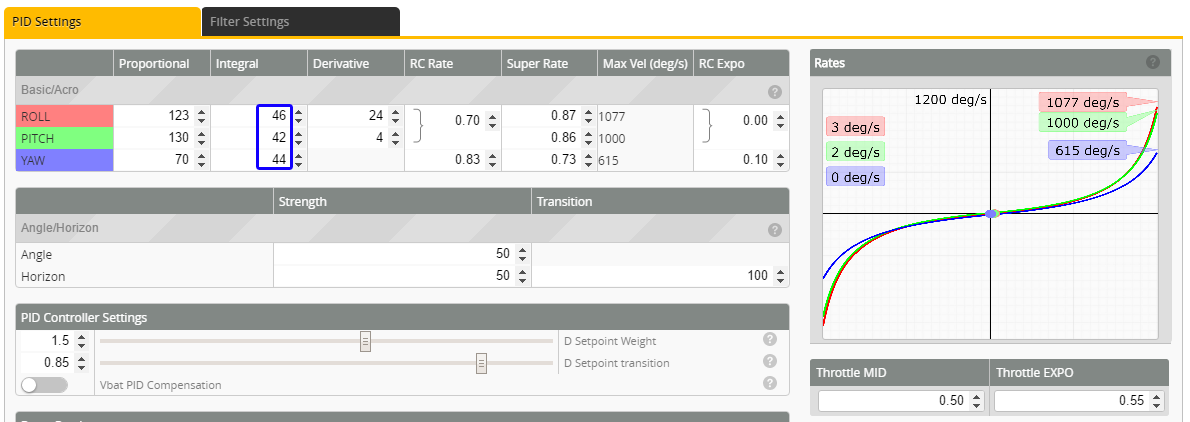
>> Résultat
Allez dans la partie PID Tuning et regardez la valeur. Remettez maintenant la valeur de « I » pour le Yaw et reprenez la valeur de pour le Pitch également et mettez-là à sa place.
Avant de cliquer sur Save, on va encore remettre les valeurs TPA comme elles étaient avant. Une fois que c’est bon, vous pouvez cliquer sur Save.
On va maintenant retourner dans l’onglet Adjustments pour décocher la première ligne afin que cela n’interfère plus lorsque l’on utilise le switch associé sur la télécommande.
Vous devriez donc maintenant avoir un multi qui a des réactions assez correctes. Mais on va voir encore un peu plus loin maintenant…
Fine tuning
(A prononcer « faïne tiouningue »)
Maintenant qu’on a mis toutes les valeurs (à l’exception du Yaw, on est d’accord), ben elles vont maintenant travailler ensemble et donc peut-être qu’elles vont nécessiter quelques ajustements car elles vont s’influencer un peu.
Pour faire ce « fine tuning », vous avez plusieurs possibilités :
- Utiliser la « blackbox » (voir article ici) pour détecter et supprimer les éventuelles oscillations
- Y aller au ressenti et ajuster de temps en temps les valeurs manuellement.
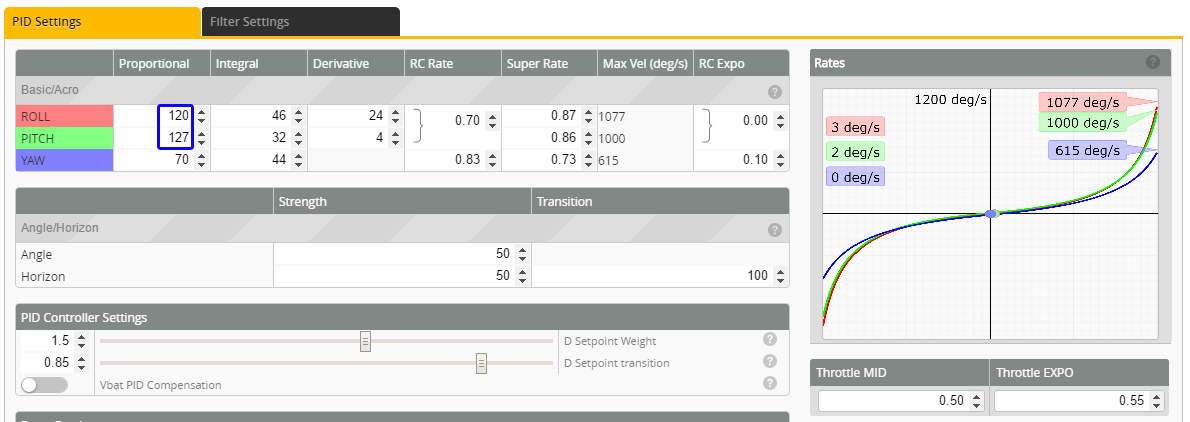
Ça me donne donc les valeurs suivantes, mais qui peuvent peut-être être encore affinées :
Voilà pour le tuto, j'espère qu'il vous sera utile






 ) mais je ne me souviens plus du pourquoi du comment
) mais je ne me souviens plus du pourquoi du comment 




